LEGO Spikeを活用したロボットプログラミング体験授業を実施 — 共創ラボにて走行競技に挑戦
2025年5月12日(月)、5号館「共創ラボ」の知能ロボティクスラボにおいて、ロボットプログラミング教育を手がけるCrefus社の協力のもと、体験型ロボットプログラミング授業を実施しました。
今回の授業では、教育用ロボット教材LEGO Spikeを使用し、センサーやモーターを組み込んだ自律走行ロボットの製作に取り組みました。学生たちは、視覚的に操作可能なプログラミング環境を用いてライントレース制御を実装し、いかに正確かつ高速にラインを走行できるかを競う走行タイムレースにも挑戦しました。
本プログラムには斎藤ゼミおよび秋山ゼミ所属の学生が参加し、ロボット工学や制御アルゴリズムへの理解を深めるとともに、試行錯誤を通じた課題解決力やチームでの創造的な取り組みの重要性を実感する機会となりました。
今後も本学では、共創ラボを拠点として、実社会とつながる実践的かつ魅力ある学びを展開してまいります。
今回の授業では、教育用ロボット教材LEGO Spikeを使用し、センサーやモーターを組み込んだ自律走行ロボットの製作に取り組みました。学生たちは、視覚的に操作可能なプログラミング環境を用いてライントレース制御を実装し、いかに正確かつ高速にラインを走行できるかを競う走行タイムレースにも挑戦しました。
本プログラムには斎藤ゼミおよび秋山ゼミ所属の学生が参加し、ロボット工学や制御アルゴリズムへの理解を深めるとともに、試行錯誤を通じた課題解決力やチームでの創造的な取り組みの重要性を実感する機会となりました。
今後も本学では、共創ラボを拠点として、実社会とつながる実践的かつ魅力ある学びを展開してまいります。

自立走行ロボット制作の様子
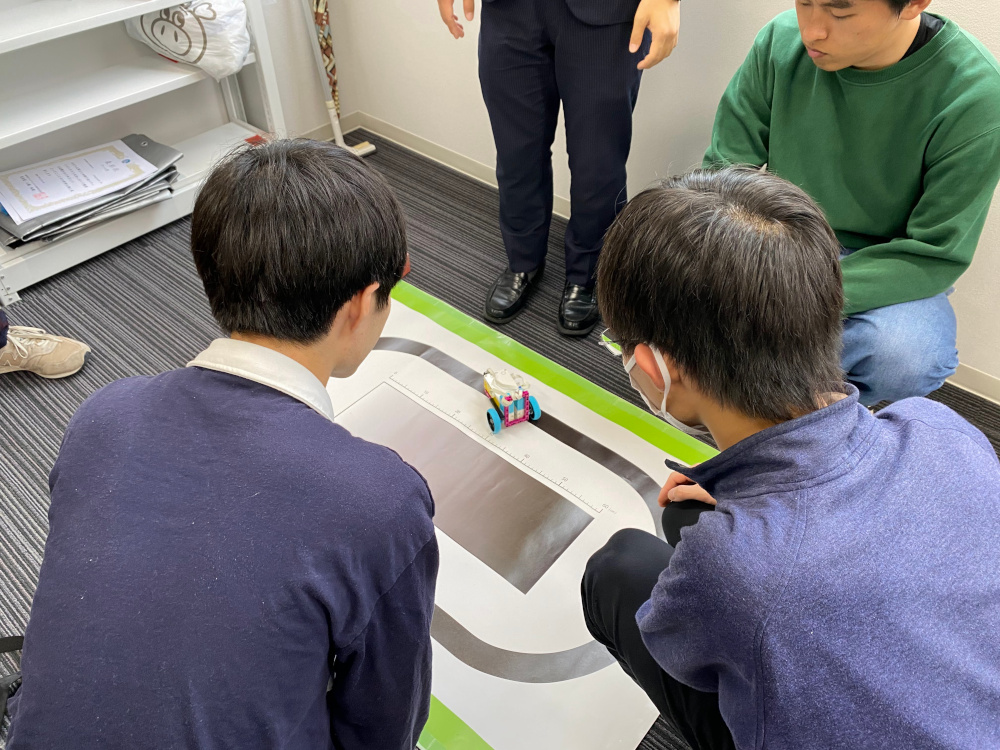
走行タイムレースの様子
-
組込みシステム関連の研究に取り組んでおり、その中の一つとして、小惑星探査ローバーの研究をおこなっています。
-
小惑星探査ローバーの開発を通じて、小型デバイスにおけるAIを用いた画像認識手法の研究をおこなっています。
-
情報社会の未来を切り拓き、新たなイノベーションにつながる様々な挑戦に取り組む研究拠点です